Scenarios
Scenarios are the foundation of HumaLab's adaptive validation system. They define parameterized configurations using probability distributions, enabling systematic exploration of your AI system's behavior.
Creating a Scenario
import humalab as hl
scenario = hl.scenarios.Scenario()
scenario.init(scenario={
"gravity": "${uniform: -9.8, -8.8}",
"friction": "${gaussian: 0.5, 0.1}",
"wind_speed": "${truncated_gaussian: 0, 2, 0, 10}"
})Scenario GUI
From the Scenario Main page, you can add new scenarios, or view the existing scenarios Click "Add Scenario" icon
Using the GUI to create a Scenario
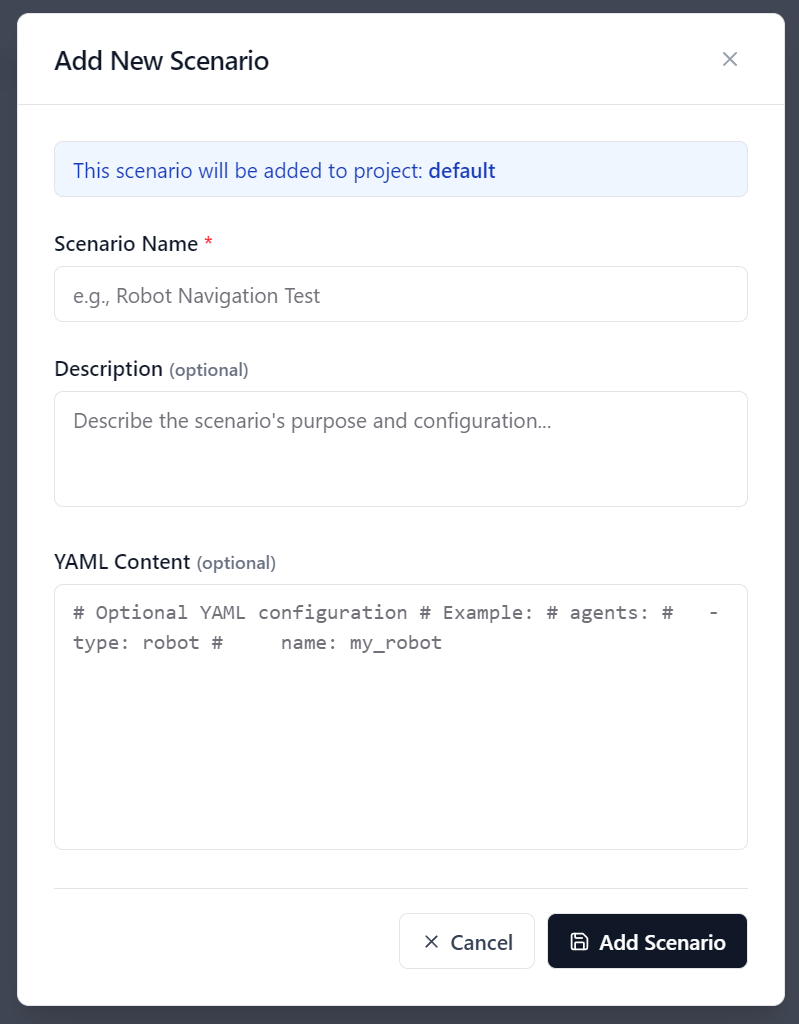
Add the Scenario name, and other optional details to create a new scenario. If you have the YAML configuration ready, you can also add it here.
Using the GUI add or edit YAML Configuration
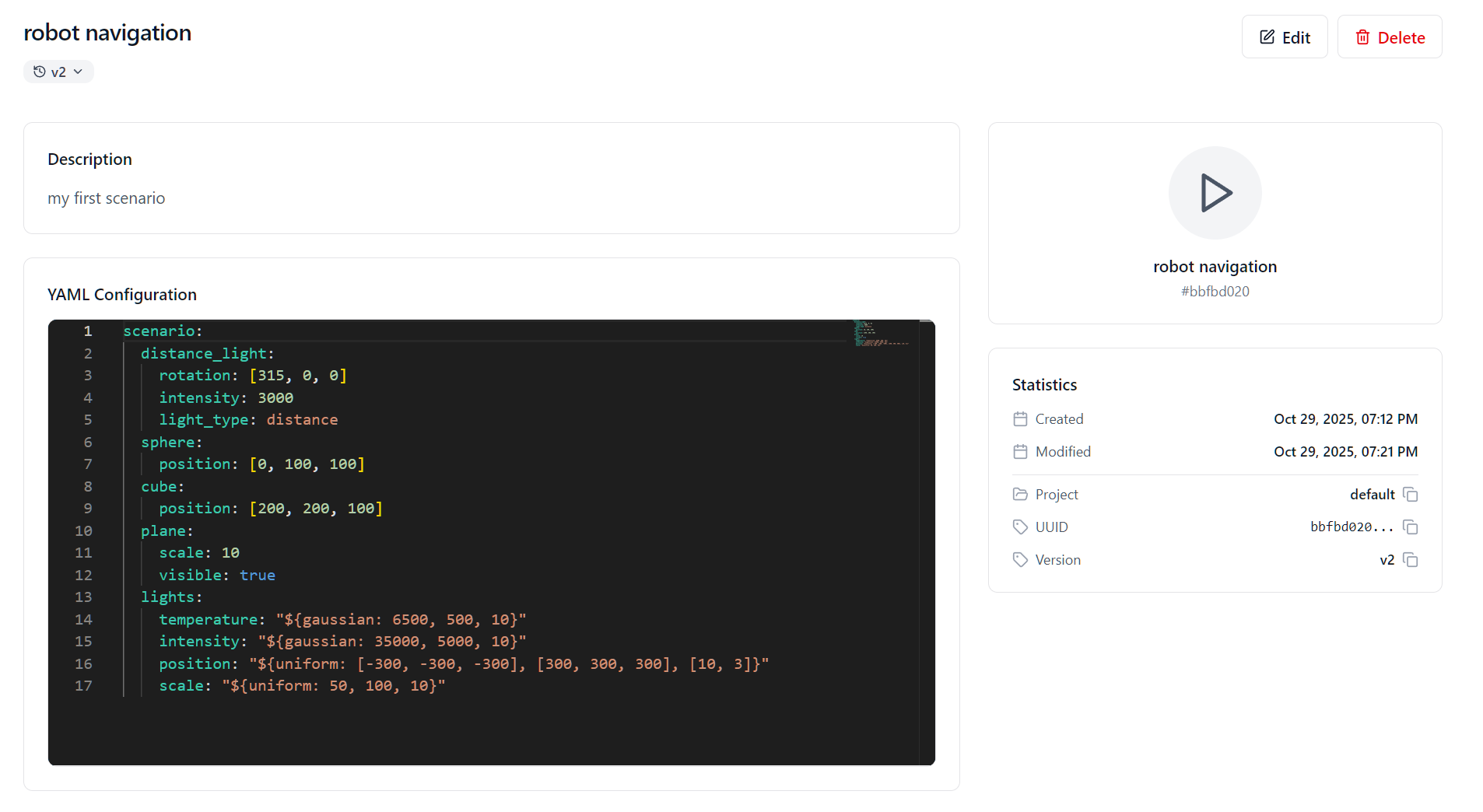
After creating a new scenario, or selected an exisiting scenario from the main page, you can edit the YAML configuration by clicking "Edit".
Supported Distributions
HumaLab supports a variety of probability distributions for scenario parameters:
Scalar Distributions (0D)
Uniform Distribution
Samples uniformly between min and max values.
"${uniform: min, max}"
# Example: "${uniform: 0, 10}"Gaussian (Normal) Distribution
Samples from a normal distribution with specified mean and standard deviation.
"${gaussian: mean, std}"
# Example: "${gaussian: 5.0, 1.0}"Truncated Gaussian
Samples from a normal distribution bounded by min and max values.
"${truncated_gaussian: mean, std, min, max}"
# Example: "${truncated_gaussian: 5.0, 1.0, 0, 10}"Log-Uniform Distribution
Samples uniformly in log space, useful for parameters that span multiple orders of magnitude.
"${log_uniform: min, max}"
# Example: "${log_uniform: 0.001, 1.0}"Bernoulli Distribution
Binary distribution returning 0 or 1.
"${bernoulli: p}"
# Example: "${bernoulli: 0.5}"Categorical Distribution
Samples from a list of choices (numbers or strings) with optional weights.
"${categorical: choices, weights}"
# Example: "${categorical: ['red', 'green', 'blue'], [0.5, 0.3, 0.2]}"
# Example: "${categorical: [10, 20, 30], [0.5, 0.3, 0.2]}"
# Example: "${categorical: ['A', 'B', 'C']}" # Uniform if weights not providedDiscrete Distribution
Samples integer values uniformly from a range [low, high).
"${discrete: low, high, endpoint}"
# Example: "${discrete: 1, 10}" # Samples from [1, 10) - excludes 10
# Example: "${discrete: 1, 10, true}" # Samples from [1, 10] - includes 10
# Example: "${discrete: 0, 100, false}" # Samples from [0, 100) - excludes 100Multi-Dimensional Distributions
HumaLab supports 1D, 2D, and 3D versions of several distributions. Important: 1D distributions use the same scalar parameters as 0D but return a 1-element array. 2D and 3D use array parameters.
# 1D Uniform (same parameters as 0D, returns array of size 1)
"position_x": "${uniform_1d: -10, 10}"
# 1D Gaussian (same parameters as 0D, returns array of size 1)
"velocity": "${gaussian_1d: 5.0, 1.0}"
# 2D Gaussian (array parameters for 2D output)
"coordinates": "${gaussian_2d: [0, 0], [1, 1]}"
# 3D Uniform (array parameters for 3D output)
"position_3d": "${uniform_3d: [-5, -5, 0], [5, 5, 10]}"Parameter Rules:
- 0D (scalar):
uniform(min, max)→ returns single value - 1D:
uniform_1d(min, max)→ returns[value](1-element array, same scalar params) - 2D:
uniform_2d([min, min], [max, max])→ returns[value1, value2](array params) - 3D:
uniform_3d([min, min, min], [max, max, max])→ returns[value1, value2, value3](array params)
Scenario Configuration
YAML String Format
You can define scenarios using YAML strings:
scenario_yaml = """
environment:
gravity: ${uniform: -9.8, -8.8}
temperature: ${gaussian: 20, 0.5}
robot:
initial_position: ${uniform_2d: [-1, -1], [1, 1]}
mass: ${log_uniform: 0.5, 2.0}
task:
difficulty: ${categorical: ['easy', 'medium', 'hard'], [0.5, 0.3, 0.2]}
"""
scenario.init(scenario=scenario_yaml)Dictionary Format
Alternatively, use Python dictionaries:
scenario_dict = {
"environment": {
"gravity": "${uniform: -9.8, -8.8}",
"temperature": "${gaussian: 20, 5}"
},
"robot": {
"initial_position": "${uniform_2d: [-1, -1], [1, 1]}",
"mass": "${log_uniform: 0.5, 2.0}"
}
}
scenario.init(scenario=scenario_dict)Resolving Scenarios
When you create an episode, the scenario is resolved by sampling from all distributions:
# The scenario template
print(scenario.yaml)
# Create a run and episode
run = hl.Run(scenario=scenario, project="test")
episode = run.create_episode()
# Get the resolved values
resolved_scenario, episode_vals = scenario.resolve()
print(resolved_scenario) # Concrete values sampled from distributionsUsing Scenarios with init()
You can pass a Scenario instance directly to init() for more control over scenario initialization:
import humalab as hl
from humalab.scenarios import Scenario
# Create and initialize a scenario
scenario = Scenario()
scenario.init(
scenario={
"gravity": "${uniform: -9.8, -8.8}",
"friction": "${gaussian: 0.5, 0.1}",
"wind_speed": "${truncated_gaussian: 0, 2, 0, 10}"
},
seed=42 # Set seed for reproducibility
)
# Use the scenario instance in init()
with hl.init(
project="physics_sim",
name="controlled_test",
scenario=scenario, # Pass Scenario instance
api_key="your_api_key"
) as run:
for i in range(10):
with run.create_episode() as episode:
print(f"Gravity: {episode.gravity}")
print(f"Friction: {episode.friction}")
# Run your tests...Alternative: Pass scenario dict directly to init():
with hl.init(
project="physics_sim",
name="inline_test",
scenario={
"gravity": "${uniform: -9.8, -8.8}",
"friction": "${gaussian: 0.5, 0.1}"
},
seed=42, # Seed can be passed here too
api_key="your_api_key"
) as run:
# Scenario is automatically initialized
passScenario IDs and Versions
You can specify scenario IDs and versions for tracking:
scenario.init(
scenario=scenario_dict,
scenario_id="my_scenario:1", # Format: "name:version"
seed=42 # Optional seed for reproducibility
)Accessing Scenario Data
Template Access
# Get the scenario template (with distribution placeholders)
template = scenario.template
yaml_str = scenario.yaml
# Get scenario metadata
scenario_id = scenario.scenario_id # The scenario ID
seed = scenario.seed # The random seed (if set)Example:
scenario = Scenario()
scenario.init(
scenario={"param": "${uniform: 0, 10}"},
scenario_id="my_scenario:1",
seed=42
)
print(f"ID: {scenario.scenario_id}") # Output: my_scenario
print(f"Seed: {scenario.seed}") # Output: 42
print(f"YAML:\n{scenario.yaml}")Episode-Specific Values
# Each episode has its own sampled values
episode = run.create_episode()
# Episode values are automatically tracked and uploadedBest Practices
-
Use Appropriate Distributions: Choose distributions that match your parameter's characteristics
- Use
uniformfor bounded parameters without a preferred value - Use
gaussianfor parameters with a natural center value - Use
log_uniformfor parameters spanning multiple orders of magnitude
- Use
-
Set Reasonable Bounds: Ensure distribution parameters create valid values for your use case
-
Version Your Scenarios: Use scenario IDs and versions to track changes over time
-
Test Resolution: Verify that scenario resolution produces valid configurations:
for i in range(10): resolved, vals = scenario.resolve() print(f"Sample {i}: {resolved}") -
Document Your Distributions: Include comments explaining why specific distributions and parameters were chosen